Bin Picking

Tri de déchets

Agriculture Intelligente

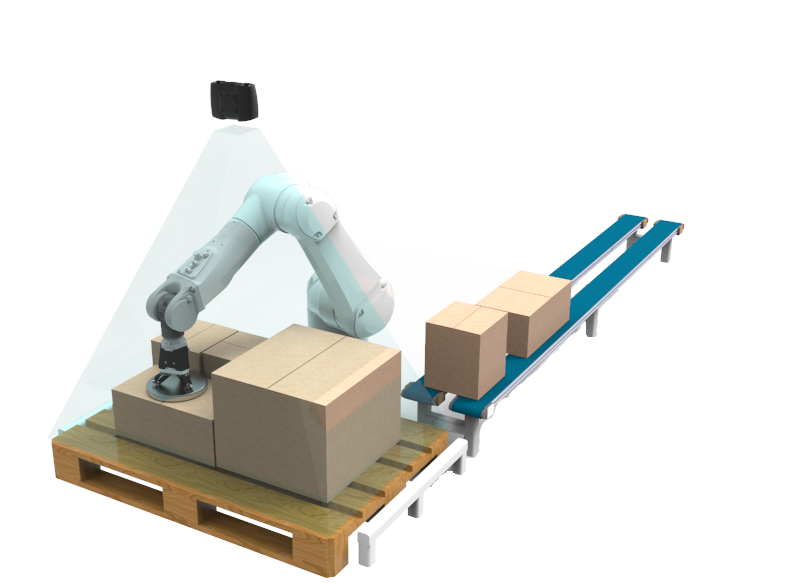
BIN PICKING 3D
INNODURA innove encore avec l’association de l’Intelligence Artificielle pour booster les fonctions de localisations 3D. A la clé, une nouvelle technologie permettant d’ouvrir les portes de la robotique adaptive ! Avec cette fonctionnalité unique, INNOPICK s’adapte désormais aux cas de dépalettisations hétérogènes et dévracages complexes (pièces déformables, pièces aléatoires…).
VOIR LES DETAILS




CONTRÔLE DES DECHETS
En améliorant les procédés du recyclage mécanique, ViaLIBS permettra de produire des matières premières recyclées de qualité sur le territoire et ainsi réduire le recours à l’enfouissement, à l’incinération et diminuer l’exploitation des ressources naturelles.





ROBOT AUTONOME OUTDOOR
L’objectif principal d’AgriVia consiste à développer des systèmes de perception fiables afin de reconstruire l’environnement en temps réel en y apportant des informations sémantiques, dépassant la simple topologie. Il s’agit d’enrichir les informations sur la reconnaissance de l’environnement pour alimenter des processus de diagnostic et de décision.