
Cap sur 2022 ! Une nouvelle année sous le signe de l’innovation et de l’industrie 4.0. Merci à nos partenaires pour leur confiance depuis de nombreuses années.

INNODURA sera présent aux journées portes ouvertes Staubli à Rochexpo situé à la Roche-sur-Foron. INNOPICK, système ultra-performant en dévracage 3D, sera mis à l’honneur sur le stand du CETIM. Le CETIM et INNODURA ont collaboré pour mettre en œuvre une démonstration d’un système innovant de dévracage 3D. Les visiteurs pourront observer le pilotage d’un 7ème axe […]

Notre technologie InnoViA est un système de détection de présence humaine. InnoViA s’appuie sur un réseau de caméra ainsi qu’une intelligence artificielle afin de prévenir et gérer les collisions entre l’Homme et la Machine. Cette solution utilise des accélérateurs matériel d’inférence pouvant aller jusqu’a 6 caméras.
Meanwhile a intégré notre technologie InnoViA sur son robot AMR Xup-Med.
Cette intégration va permettre au Xup-Med d’accueillir les visiteurs sur le salon référence de la santé et de l’innovation, le Santexpo à Paris.
Innodura TB sera présent au salon Pollutec 2021 !
Afin de mieux comprendre les enjeux environnementaux dans le secteur industriel, Axelera a invité Innodura TB à échanger sur le sujet du numérique, de la robotique et de l’automatisation au service de la gestion des déchets.
N’hésitez pas à redécouvrir nos réalisations !

Le SIDO Lyon – IoT, AI, Robotics & XR 2021 touche à sa fin et il a été couronné de succès!
Nous remercions l’ensemble des visiteurs que nous avons rencontrés sur notre stand et espérons vous revoir prochainement afin de vous accompagner dans vos futurs projets !



Localisation Indoor par une approche multi SLAM
Innodura TB a participé au challenge MALIN, mis en place par la DGA et l’ANR sur un système de localisation Indoor.

Ainsi le projet, vise à la création d’un système permettant de suivre
des agents d’interventions d’urgences (militaires, policier …. ) dans
des environnements complexes Indoor inconnus (tels que des endroits sombres, enfumés …)
Enfin, pour retrouver toutes les informations sur le projet LOCA 3D

N’hésitez pas à nous rendre visite sur notre stand E111 du SIDO 2021 à Lyon du 22 au 23 septembre !
Nous présenterons au SIDO Lyon, 3 de nos dernières innovations :
– INNOVIA un système de prévention des collisions Hommes/Machine par Intelligence Artificielle,
– INNOSCAN un système de vision 3D pour du contrôle dimensionnel ou navigation autonome ,
– INNOPICK un système novateur de dévracage 3D automatisé de pièces et guidage robot,
Nous vous attendons nombreux !

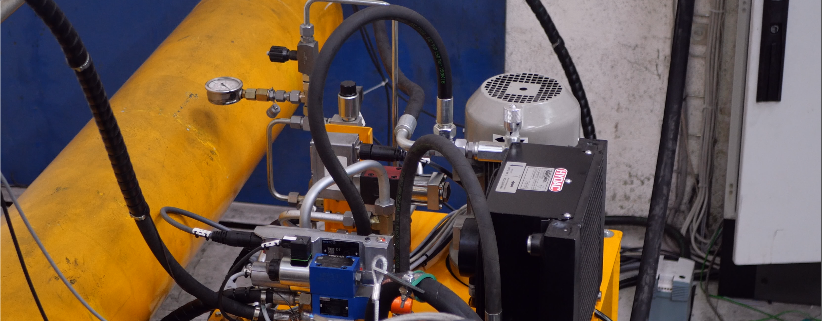
Baie monitoring et surveillance d’essais en chambre climatique pour des groupes de climatisation et de chauffage pour les véhicules industriels.
Pour en savoir plus sur la solution apportée par INNODURA :